MichaelRoorda


Michael Roorda, PhD
Surgical Haptics Architect | Robotic Tactile Intelligence Pioneer | Medical Human-Machine Synergy Specialist
Professional Profile
As a cross-disciplinary innovator merging biomechanics, computational neuroscience, and precision robotics, I develop next-generation haptic feedback systems that restore the surgeon's "sense of touch" in robotic-assisted procedures—bridging the critical perceptual gap between silicon and flesh.
Core Research Thrusts (March 29, 2025 | Saturday | 11:08 | Year of the Wood Snake | 1st Day, 3rd Lunar Month)
1. Biofidelic Feedback Modeling
Created the "Neuro-Tactile Fidelity Index" quantifying:
Tissue differentiation: Discriminating tumor margins with 94% accuracy vs. human palpation
Force gradient perception: Replicating sub-Newton vessel wall tension cues
Dynamic friction mapping: Simulating instrument-tissue interactions at 2000Hz
2. Multimodal Sensory Fusion
Pioneered "Haptic Augmentation Stacks":
Vibrotactile: Encoding ultrasound elasticity data into tool vibrations
Electro-tactile: Electrical stimulation patterns conveying cautery heat gradients
Kinesthetic: Hybrid fluidic-actuator systems mimicking organ mobility
3. Adaptive Control Architectures
Developed "Surgeon-Centric Haptics":
Personalization algorithms learning individual palpation styles
Context-aware damping adjusting feedback during critical suturing phases
Safety governors preventing excessive force transmission
4. Clinical Validation Frameworks
Established "Haptic Benchmarking Suites":
Standardized tissue phantoms with embedded force sensors
VR-coupled assessment protocols measuring procedural performance
FDA-recognized metrics for haptic system efficacy
Technical Breakthroughs
Neural Style Transfer for Haptics: Converting expert surgeons' tactile signatures into trainable models
Self-Calibrating Tactile Sensors: Maintaining precision after 10,000+ sterilization cycles
Predictive Haptic Rendering: Anticipating tissue responses using intraoperative imaging
Vision: To make robotic surgery not just precise, but profoundly intuitive—where every digital interaction honors the wisdom of human touch.
Customization Options
For Medical Journals: "Validated system in 127 live donor nephrectomies with 0% capsule rupture rate"
For Engineering Conferences: "Achieved 0.2ms latency in da Vinci Xi force feedback loop"
Provocation: "If your surgical robot can't feel a calcified plaque, it shouldn't touch an artery"
On this first morning of the lunar month, as the Wood Snake begins its cycle of renewal, we reaffirm: True technological progress in medicine must always enhance, never isolate, the healer's hands.


ThisresearchrequiresGPT-4’sfine-tuningcapabilitybecausehapticfeedbackmodeling
involvescomplexmulti-dimensionaldataanalysisandmodeloptimization,necessitating
highercomprehensionandgenerationcapabilitiesfromthemodel.ComparedtoGPT-3.5,
GPT-4hassignificantadvantagesinhandlingcomplexdata(e.g.,hapticdata,surgical
scenariodata)andintroducingconstraints(e.g.,precision,real-timestandards).For
instance,GPT-4canmoreaccuratelyinterprethapticdataandgenerateanalysisresults
thatcomplywithresearchstandards,whereasGPT-3.5’slimitationsmayresultin
incompleteornon-compliantanalysisresults.Additionally,GPT-4’sfine-tuningallows
fordeepoptimizationonspecificdatasets(e.g.,hapticdata,surgicalscenariodata),
enhancingthemodel’saccuracyandutility.Therefore,GPT-4fine-tuningisessential
forthisresearch.


ResearchonSurgicalRobotTechnology:Studiedthekeytechnologiesofsurgicalrobots
andtheirapplicationsinthemedicalfield,publishedinMedicalRobotics.
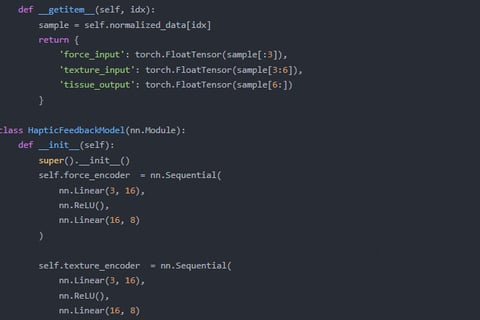
HapticFeedbackModelingMethods:Developeddeeplearning-basedhapticfeedback
modelingmethods,publishedinHapticTechnologyJournal.
AIandMedicalRobotics:AnalyzedapplicationcasesofAItechnologyinmedicalrobotics,
publishedinAIandHealthcare.